プッシュコープ社 ロボットアーム先端取付工具用アクティブ・コンプライアンス・コントローラ
会社紹介

人間の「感覚」をロボットへ
製造現場における省人化は急務の課題。
特に国内の研削・研磨業界は人手不足や熟練工の高齢化が話題になっています。
しかし、ワーク形状が複雑であればあるほど人手からの脱却は困難でした。
解決策は、プッシュコープの自動倣い装置です。
熟練工の高齢化、継承者問題、労働力不足、人口減少、生産性向上、品質の安定、粉塵問題、職場環境改善、プッシュコープが解決します!
技術
自動倣い技術とは
標準的な産業用ロボット単体では一定の圧力で研削・研磨をすることは不可能ですが、プッシュコープの自動倣い装置を利用することで、一定の圧力で研削・研磨をすることが可能になります。プッシュコープの自動倣い装置は、力覚・加速度・位置のフィードバックを基幹としたクローズドループ制御でスライダーを迅速に調節します。ロボットアームの重量やアームのしなりを考慮する必要が無く、ティーチングやワークの差異に影響されず、より正確な研削・研磨を容易に行うことができます。
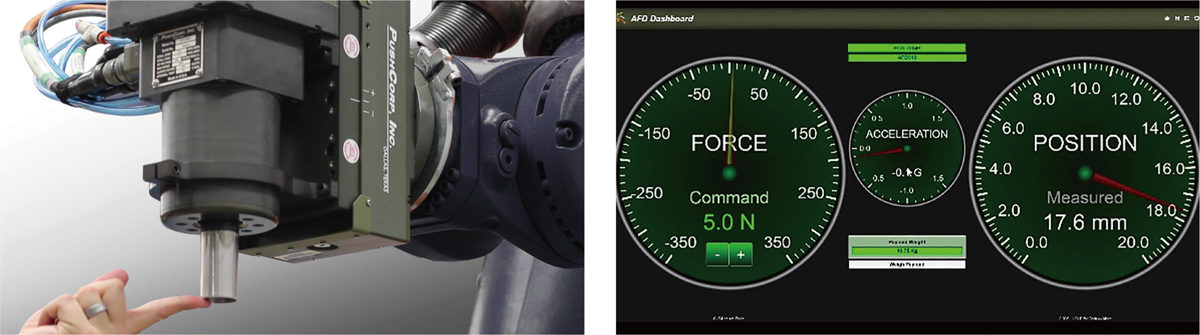
Active コンプライアンス

Activeコンプライアンス装置は、全姿勢で一定の加圧力研磨を可能にします。加圧力値を設定するだけで、上にも下にも、横にも、あらゆる方向に一定力の研磨を行えます。曲面など複雑形状のワークに対応できます。
Passive コンプライアンス

Passiveコンプライアンス装置は、外部から供給されるエアーのレギュレーターで加圧力を設定する経済的な装置です。平面や四角な形状等には、十分な性能を発揮します。溶接部粗削り等のさほど仕上げ精度が必要でない特定用途にも使えます。
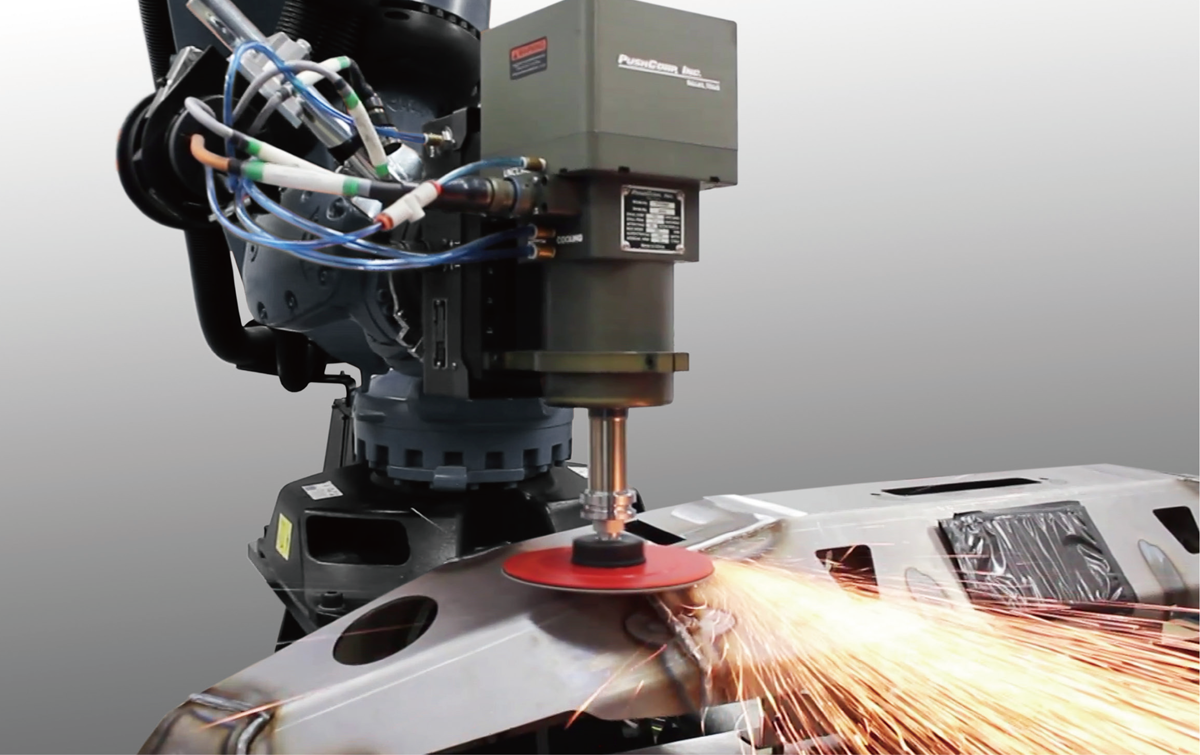
液冷スピンドルモーター
プッシュコープ社はロボット用のスピンドルモーターを20年以上製造してきました。
次のような特徴があります。
- ロボットへの取付を前提としており、想定外の衝突等による破損の可能性を低減した形状設計としている。
- 液冷ユニットであり、空冷ユニットに2 比べてパワーウェイトレシオが優れている。
- 倣い装置制御装置と組合す際、ロボットの軸方向、径方向のどちらにでも組み合わせが可能。
- 業界標準BTホルダーを利用しており、オートツールチェンジ可能である。ツール交換の頻度が少ない用途ではコレットチャックを利用する。

システム構成
基本構成は「自動倣い装置+液冷スピンドルモーター+ロボット」です。愛知産業には豊富なエンジニアリング実績があり、お客様の用途に応じてプッシュコープユニットを設備一式のアプリケーションとしてお届けすることも可能です。
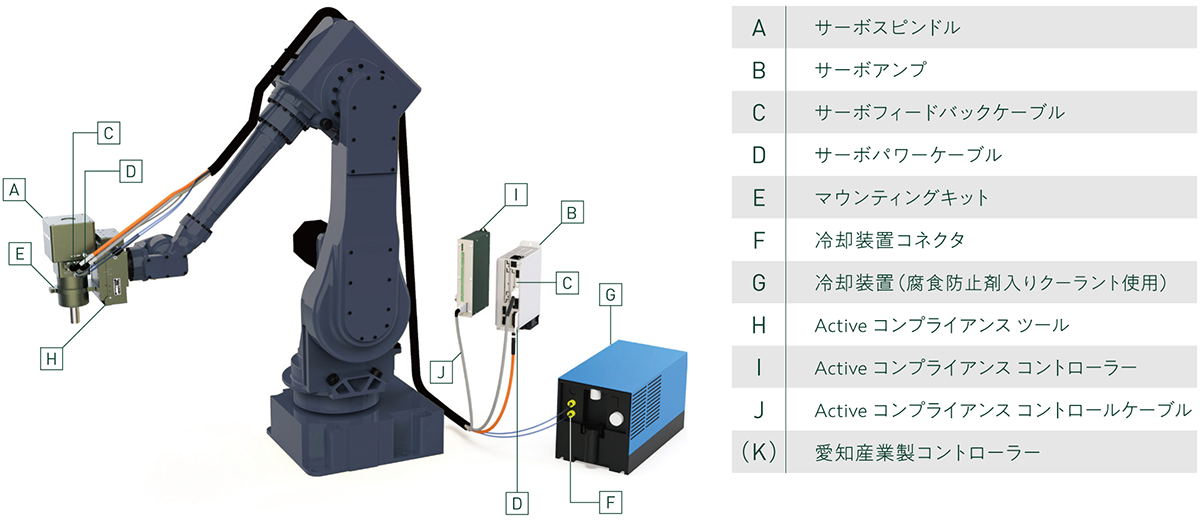
システム構成
自動研削ツールの構成

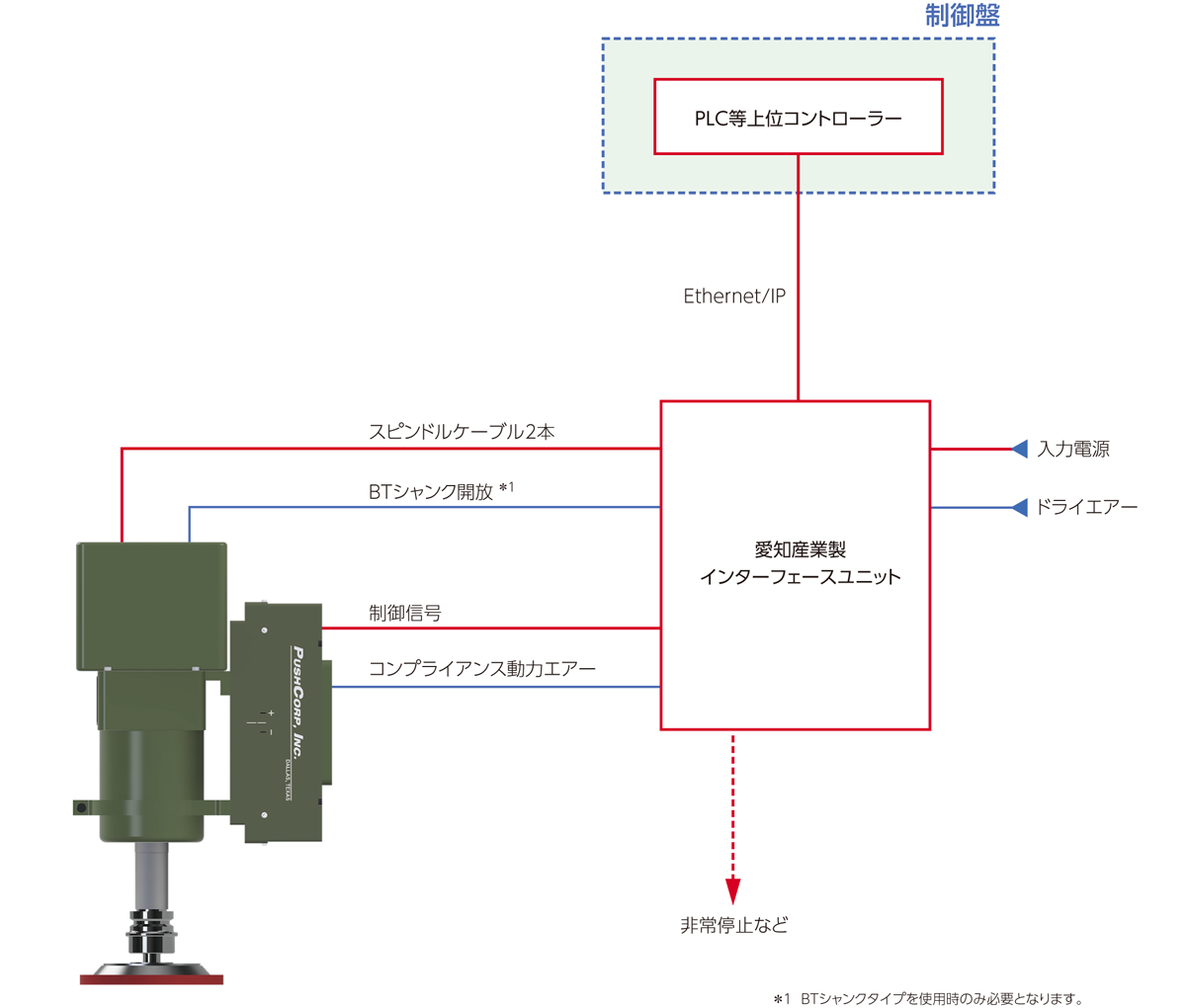
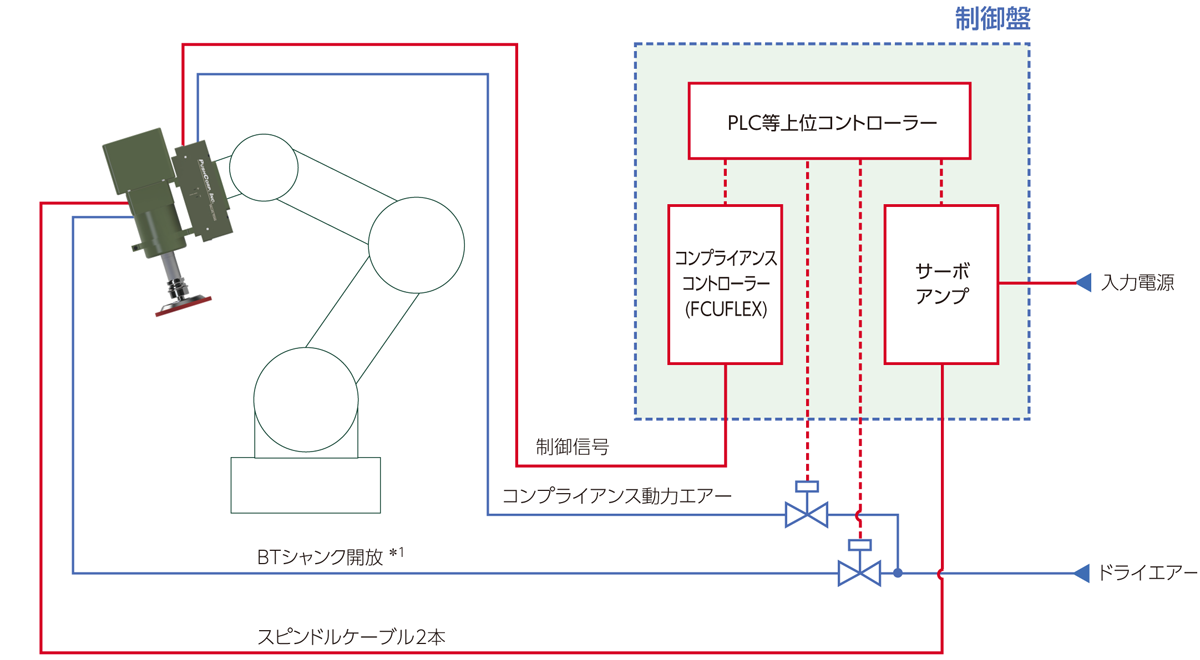
制御構成例〈Active コンプライアンス〉
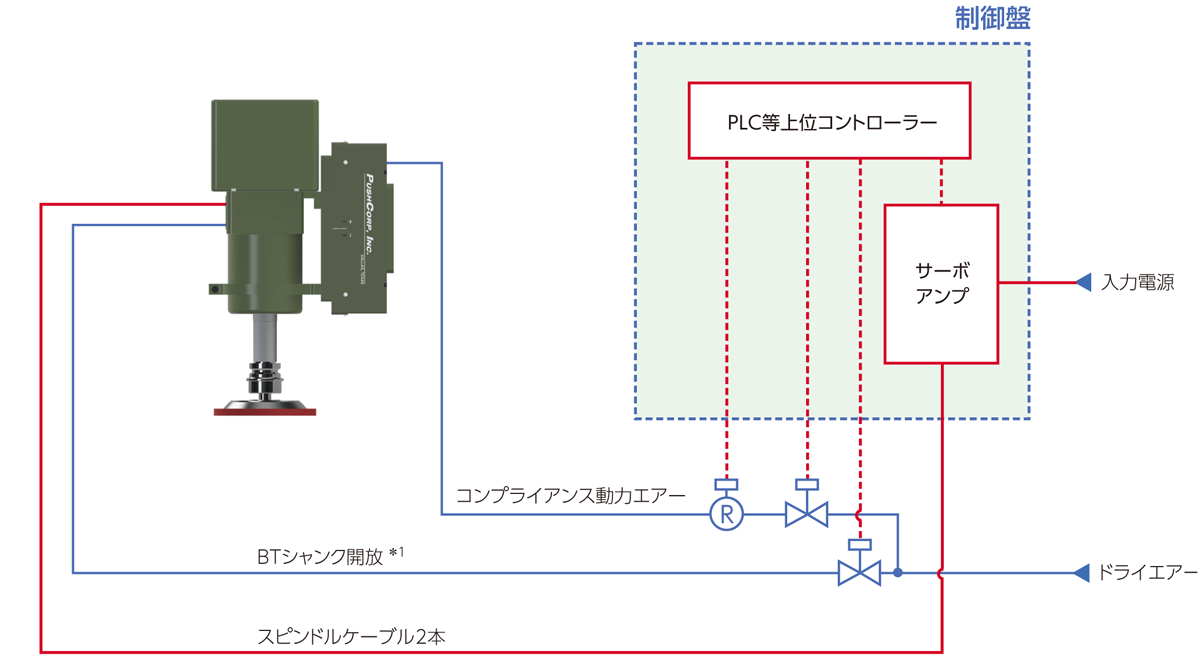
制御構成例〈Passive コンプライアンス〉
インターフェースユニット〈愛知産業製〉
Activeコンプライアンスコントローラー、サーボアンプ及び電磁弁を収納し、制御配線を簡素化した制御ボックスです。
PLCやロボットコントローラーとのI/FはEthernet/IPのみで実装可能です。